
Tänzerlagenregelung
Die Antriebsregelung mit einer Tänzerlage basiert auf der Durchhangregelung mit dem wichtigen Unterschied, dass die Zugkraft nicht durch die eigene Masse des Produktes, sondern über eine externe Kraft, die auf das Produkt einwirkt, geregelt wird.
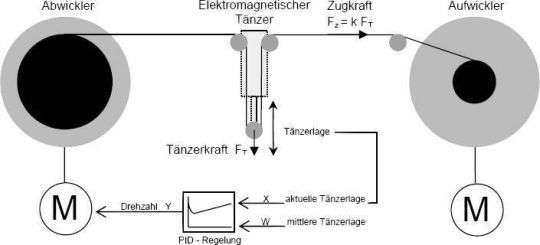
Die Tänzerlageregelung ist eine bewährte Methode zur aktiven Zugkraftregelung von Wickelgütern. Die aktive Zugkraftregelung verwendet Antriebsmotoren zum allgemeinen Transport des Wickelgutes, beispielsweise in Form eines Spulenantriebes anstatt von Bremssystemen. Im Prinzipschaltbild ist ein Umspulvorgang eines Wickelgutes vom Abwickler zum Aufwickler mit Tänzerlageregelung skizziert. Im Prinzipschaltbild wird angenommen, dass der Aufwickler mit vorgegebener Geschwindigkeit das Produkt aufwickelt. Der Abwickler muss dem Aufwickler folgen, so dass sich eine gewünschte Zugspannung einstellt.
Dies wird erreicht, indem das Wickelgut über eine bewegliche Umlenkrolle eine Kraft erfährt, die der Zugspannung in einem festen Verhältnis entspricht. Im gezeigten Prinzipschaltbild würde eine positive Beschleunigung des Aufwicklers zu einer Aufwärtsbewegung der beweglichen Umlenkrolle führen. Bei einer negativen Beschleunigung würde sich die Umlenkrolle entsprechend nach unten bewegen. Das Auf- und Abbewegen wird auch „tänzeln“ genannt, wodurch das Synonym Tänzer entstand. Nach dem Flaschenzugprinzip ist die Zugkraft proportional der Tänzerkraft. Die Tänzerlage wird wiederum zur Drehzahlregelung des Antriebsmotors, vorzugsweise mit einem PID-Regler, genutzt. Bewegt sich der Tänzer nach oben, so führt die Regelabweichung zur positiven Beschleunigung des Abwicklers und umgekehrt. Damit sich die Zugkraft bei einer Regelabweichung nicht ändert, muss die Tänzerkraft auch unabhängig der Tänzerlage stets konstant gehalten werden.
Mit herkömmlichen Tänzersystemen, die aus Gewichten, Pneumatikzylindern und (oder) Federn bestehen, können nur relativ grobe Zugkraftregelungen mit entsprechenden Zugkraftschwankungen umgesetzt werden. Dies liegt in der physikalischen Eigenschaft der Tänzerkraft begründet. Bei Tänzern mit Gewichten ändert sich die Kraft nach F = ma bereits durch die Tänzerbewegung. Die Massenträgheit verursacht zwangsläufig eine Veränderung der Zugkraft. Federn haben stets eine andere Kraft proportional zur Federlänge und widersprechen der Notwendigkeit einer konstanten Tänzerkraft, die auch mit speziellen Pneumatikzylindern nur schwer in den Griff zu bekommen ist.
Die herkömmlichen Methoden stoßen, insbesondere bei der Zugkraftregelung sensibler Produkte, an ihre technischen Grenzen. Aus diesem Grund wurde von der Firma Supertek GmbH ein elektromagnetischer Tänzer entwickelt, der auf einem von der Supertek patentierten elektromagnetischem Kraftverfahren beruht und eine hochdynamische und tänzerlagenunabhängige konstante Tänzerkraft erzeugen kann. Mit dem elektromagnetischen Tänzer EDL 60 sind Zugspannungen im Bereich von 10 cN bis 600 cN mit einer Auflösung von 0,1 cN regelbar. Wo andere Systeme versagen, können durch den Einsatz des elektromagnetischen Tänzers selbst sensibelste Wickelgüter nun sehr schnell, präzise und problemlos verarbeitet werden.
Die Veränderung der Tänzerlage sollte nicht die Zugkraft ändern, sondern lediglich zur Regelung des Antriebsmotors dienen.